Лидеры

Популярный контент
Показан контент с высокой репутацией 31.10.2021 во всех областях
-
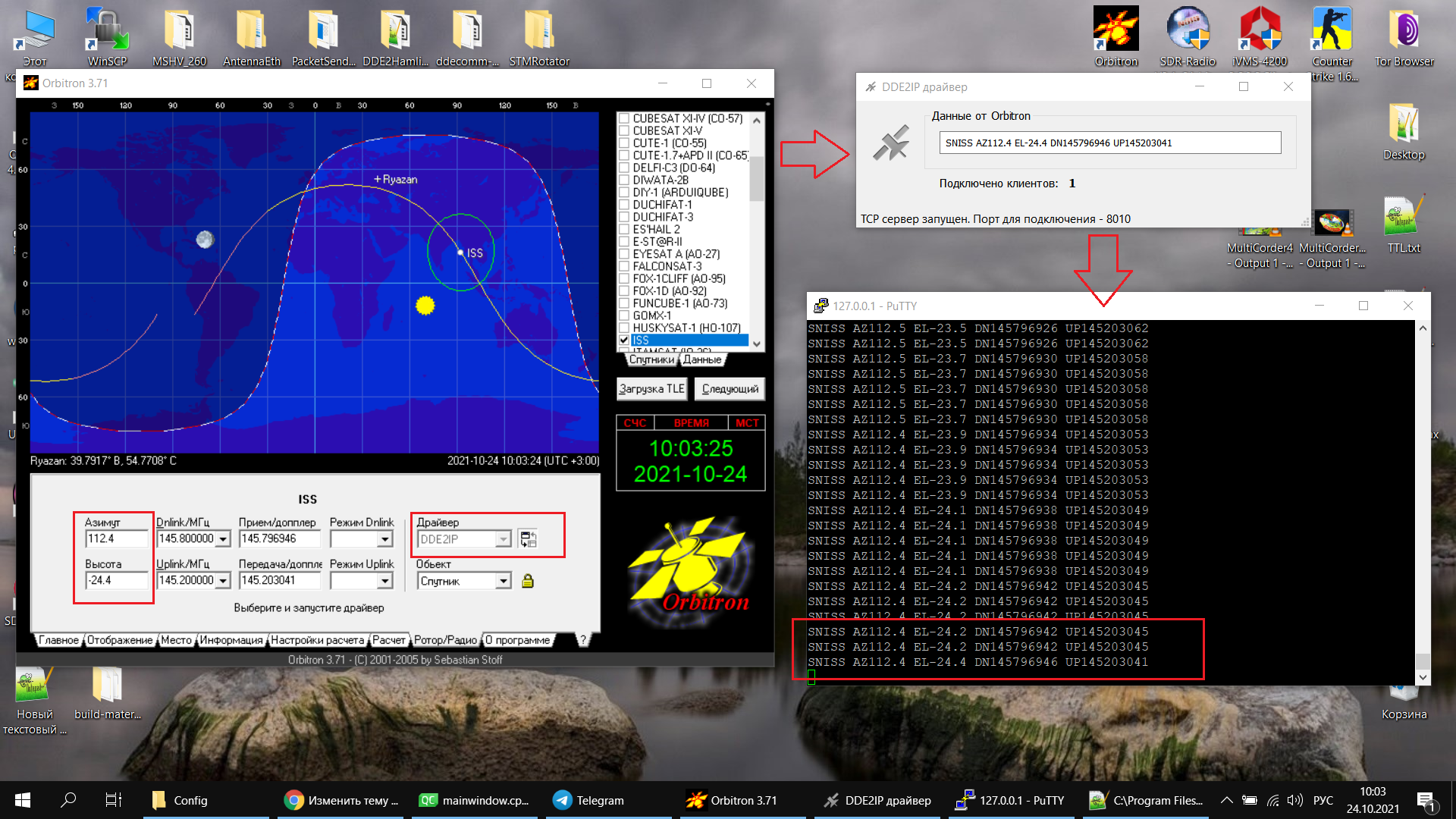
Всем доброго времени суток. В процессе разработки контроллера поворотного устройства, управляемого по IP, возникла потребность интеграции с Orbitron-ом для получения актуальных данных о положении объектов. Для этого было необходимо написать программу-драйвер. Задача драйвера - получить данные с Орбитрона по протоколу DDE и сделать их публичными для последующего использования в других приложениях. Было решено сделать это посредством TCP соединения. Алгоритм работы получился следующий - Орбитрон запускает драйвер и начинает передавать ему данные по DDE, драйвер поднимает на себе TCP сервер на порту 8010 и начинает слушать входящие подключения. При этом всем подключенным клиентам драйвер отправляет сообщения в формате: SNISS AZ121.2 EL1.9 DN145796739 UP145203248 где указывается объект, его положение по азимуту и углу места (элевации), а также значения частот с учетом Доплера. Для работы драйвера необходимо откорректировать файл конфигурации Орбитрона. Файл - ...\Config\Setup.cfg 1. В конец файла добавить секцию [Drivers] DDE2IP=C:\<Путь файлов драйвера>\DDE2IP.exe 2. В секции System [System] .... DDEdriver=DDE2IP ... Запустить Орбитрон от имени Администратора и включить передачу информации драйверу. dde2ip.rar
 1 балл
1 балл