RA3SAD
-
Постов
1 015 -
Зарегистрирован
-
Посещение
-
Победитель дней
263
Весь контент RA3SAD
-
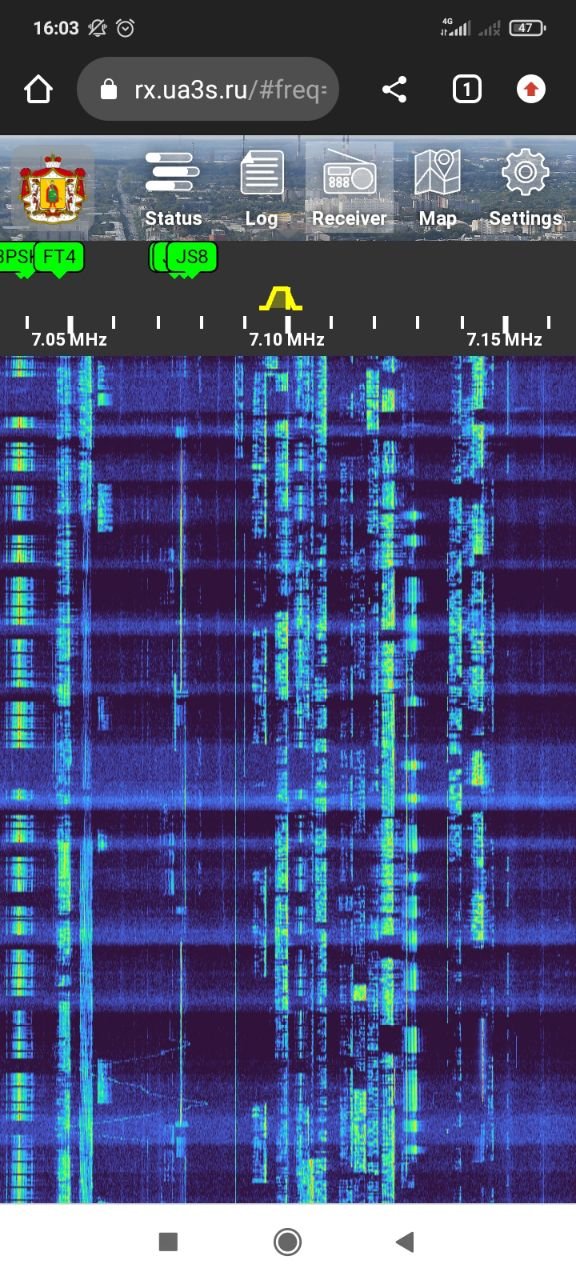
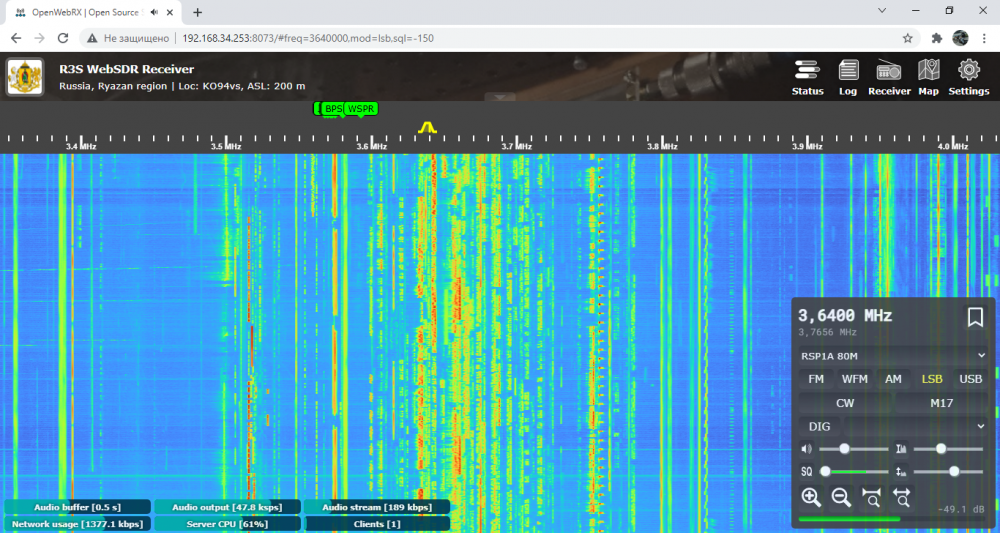
На базе областного радиоклуба включён WebSDR приемник, расположенный по адресу https://rx.ua3s.ru/ . Приемник подключён к антеннам клуба в свободное от работы в эфире время.

-
Позывной RP78PI будет активен на КВ и УКВ в период проведения мемориала "Победа" с 1 по 9 мая 2023г. QSL via RD2S. Исаичкин Пётр Петрович — командир отделения радиосвязи 399-го гвардейского миномётного дивизиона 100-го гвардейского миномётного полка 3-й гвардейской армии Юго-Западного фронта, гвардии старший сержант. Родился 10 июля 1918 года в селе Кидусово ныне Спасского района Рязанской области в семье крестьянина. Русский. Член КПСС с 1942 года. Окончил неполную среднюю школу, курсы трактористов. Работал в колхозе. В Красной Армии в 1938 – 1940 годах и с августа 1941 года. Окончил школу младших радиоспециалистов. Участник освободительного похода РККА в Западную Украину 1939 года и Советско-финляндской войны 1939 – 1940 годов. В боях Великой Отечественной войны с октября 1942 года. Сначала Исаичкин был телеграфистом, затем – командиром отделения радистов. «Стучал» ключом. Рвался в настоящий бой, но ему отказывали. После того, как вокруг армии Паулюса в Сталинграде замкнулось кольцо, Гитлер бросил на выручку сильную группировку под командованием Манштейна. Чтобы сорвать этот замысел и обеспечить дальнейшее продвижение внешнего фронта окружения на запад, командование Юго-Западного фронта решило послать в рейд по тылам врага специальную армейскую конно-механизированную группу. Ей придавались гвардейские миномёты «катюша». В её составе был командир отделения радистов гвардии старший сержант Исаичкин. К концу 1942 года фронт от Сталинграда был отодвинут на 200-250 километров. Но ещё дальше ушла конно-механизированная группа гвардии полковника Ерёменко. Она перехватывала коммуникации врага, громила на марше спешившие на фронт подкрепления, сеяла панику в фашистском тылу. Ужас на врага наводили залпы гвардейских миномётов. В настоящий ад они превращали ночлег какой-либо фашистской части в двухстах километрах от линии фронта. Точные удары «катюш» обеспечивал чёткой связью Исаичкин. Дерзкий рейд гвардейских миномётчиков не на шутку всполошил немцев. Залпы «катюш» гремели уже неподалёку от Ворошиловграда (Луганска), а входившие в состав конники побывали уже близ крупного железнодорожного узла на Донбассе – Дебальцево. Командование фашистских войск решило захватить образцы советского секретного оружия. Им удалось окружить группу в Лутугинском районе. Советские бойцы заняли круговую оборону. Исаичкин со своим отделением был послан на прикрытие «катюш». Когда показались гитлеровцы, он открыл огонь из ручного пулемёта «Дегтярёв». Всё отделение вступило в бой. Атака врага захлебнулась. Но на позиции связистов обрушился артиллерийско-миномётный смерч. Фашисты предпринимали новые и новые атаки. Но советские бойцы стояли насмерть. Исаичкин потерял счёт опустевшим пулемётным дискам. Уже перестали отзываться выстрелами некоторые его бойцы. Но до конца дня 23 февраля 1943 года они всё же выстояли, своим мужеством освятив день рождения Красной Армии. С рассветом следующего дня враг предпринял очередную попытку захватить позиции дивизиона. Он буквально перепахал минами окопы передового заслона. Но снова по ним ударил пулемёт Исаичкина. Иногда гитлеровцам удавалось приблизиться на расстояние одного броска. Тогда Исаичкин пускал в ход гранаты. Все попытки врага захватить «катюши» разбились о мужество и стойкость связистов Исаичкина. И когда фашисты затянули паузу в атаке, конники совершили внезапный ответный удар. Они пошли на прорыв. В критический момент атаки рядом с бежавшим Исаичкиным упал замертво командир эскадрона. Конники залегли. И тогда Исаичкин встал и с криком «За Родину! Вперёд!» первым бросился на врага, возглавив кавалерийский эскадрон. В расположении фашистов он действовал ручным пулемётом как дубиной, расчищая путь к своим. Но, опустив приклад на голову очередного гитлеровца, он был ранен пулей в плечо. Отнялась рука. Прорыв к тому времени был уже обеспечен. «Катюши» устремились через линию фронта. Гвардии старший сержант Исаичкин попал в госпиталь. Указом Президиума Верховного Совета СССР от 21 апреля 1943 года за образцовое выполнение боевых заданий командования на фронте борьбы с немецкими захватчиками и проявленные при этом отвагу и геройство гвардии старшему сержанту Петру Петровичу Исаичкину было присвоено звание Героя Советского Союза с вручением ордена Ленина и медали «Золотая Звезда». После излечения в госпитале Исаичкин вернулся в родной полк. Он участвовал в боях по освобождению Донбасса. 5 сентября 1943 года в бою за город Горловку Исаичкин был вторично тяжело ранен. В 1944 году Исаичкин участвовал в боях на Сандомирском плацдарме на реке Висла. Затем освобождал Польшу, форсировал Одер в районе города Фроста. В мае 1945 года Исаичкин участвовал в освобождении города Дрездена. Войну закончил на улицах Праги. После войны П.П. Исаичкин работал в колхозе на родине. В 1951-1953 годах служил в Советской Армии. Окончил радиотехнические курсы. Затем младший лейтенант запаса П.П. Исаичкин работал старшим техником радиоузла в посёлке Советский Крымской области Украинской ССР. Умер 11 апреля 1993 года. Похоронен на кладбище посёлка Советский. Награждён орденом Ленина, 2 орденами Отечественной войны 1-й степени, медалями. DXNews link . Также на текущий момент из Рязанской области зарегистрированы мемориальные позывные RP78FC и RP78VK
-
Интересно, мы к вам собирались, но не вышло. Может на следующий год тогда.
-
Собираемся в лес на мини-слет в последние выходные июля. Место - одна из стоянок между д. Горки и Заводская слобода (Клепиковский район) на берегу реки Пра. Кому интересно - милости просим. Подробнее - в Телеграме. Ссылка на канал в верхнем меню сайта.

-
Добрый день. Можно попробовать отвезти в магазин Рации и антенны что на Вокзальной.
-
За городом. Антенна моя боевая. Приёмник работает на ней когда я не работаю в эфире.
-
В связи с некоторой глючностью и прожорливостью сервера WebSDR от PA3FWM, приемник переехал на OpenWebRX. UPDATE!!! В связи с изменениями в каналах связи, временный адрес - http://5.188.106.167:8073/
-
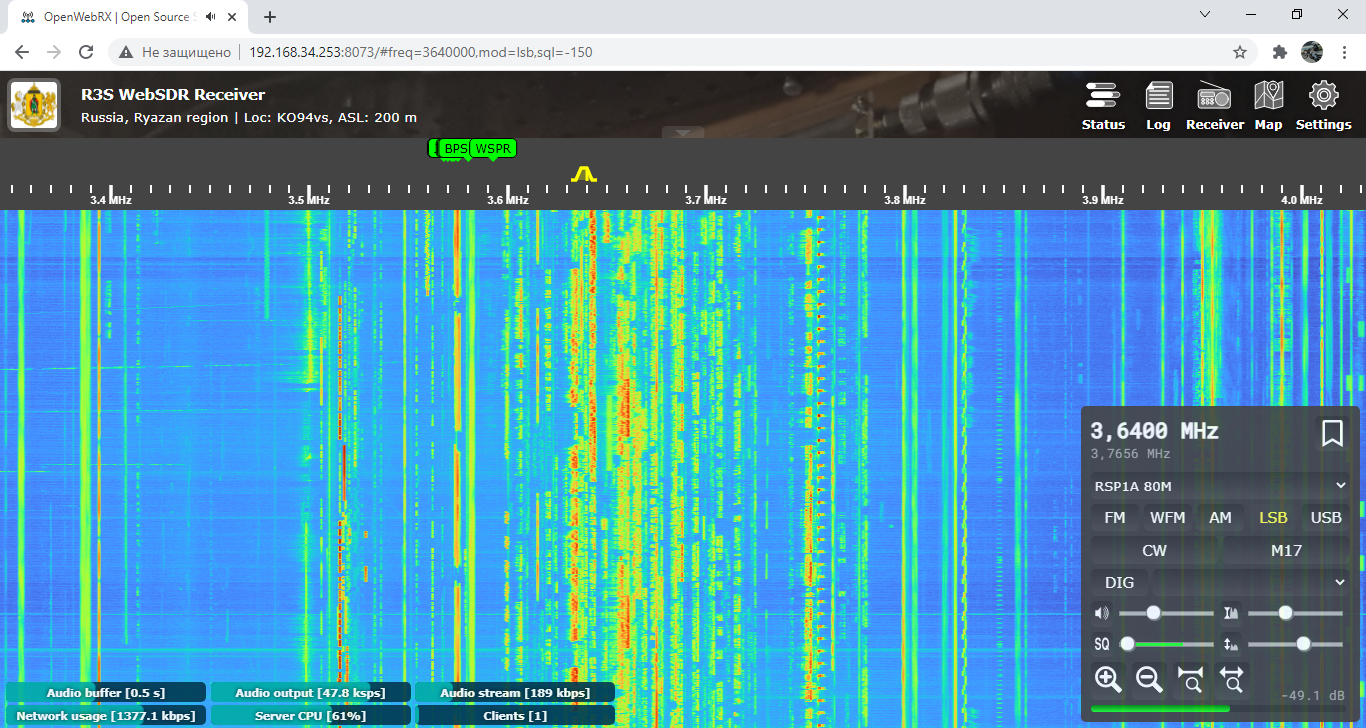
WebSDR update! Вместо свистка RTL-SDR подключен RSP. Переведен на КВ (80/40М). Адреса: http://sdr.r3s.su/ или http://5.23.105.14:8901/
-
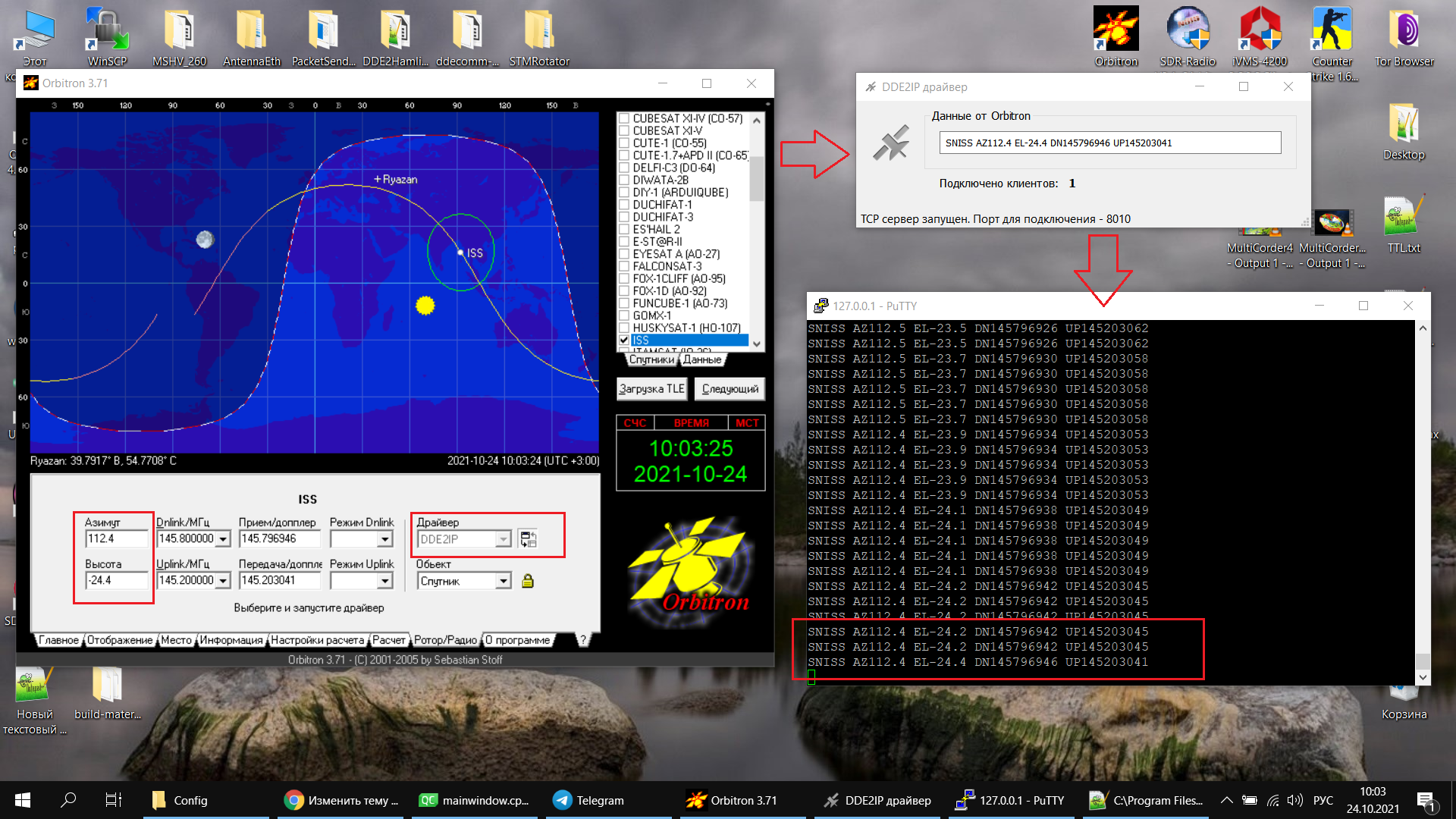
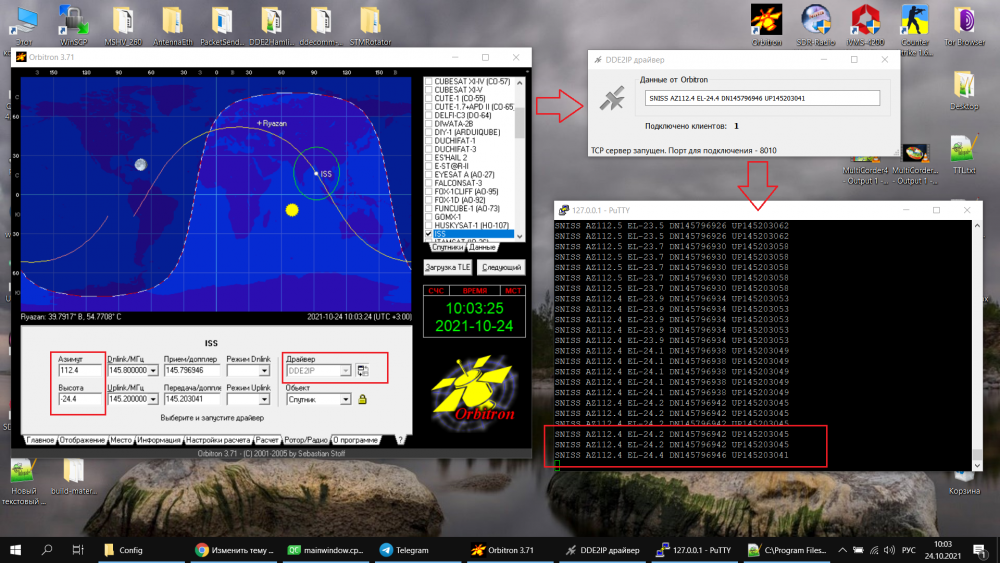
Всем доброго времени суток. В процессе разработки контроллера поворотного устройства, управляемого по IP, возникла потребность интеграции с Orbitron-ом для получения актуальных данных о положении объектов. Для этого было необходимо написать программу-драйвер. Задача драйвера - получить данные с Орбитрона по протоколу DDE и сделать их публичными для последующего использования в других приложениях. Было решено сделать это посредством TCP соединения. Алгоритм работы получился следующий - Орбитрон запускает драйвер и начинает передавать ему данные по DDE, драйвер поднимает на себе TCP сервер на порту 8010 и начинает слушать входящие подключения. При этом всем подключенным клиентам драйвер отправляет сообщения в формате: SNISS AZ121.2 EL1.9 DN145796739 UP145203248 где указывается объект, его положение по азимуту и углу места (элевации), а также значения частот с учетом Доплера. Для работы драйвера необходимо откорректировать файл конфигурации Орбитрона. Файл - ...\Config\Setup.cfg 1. В конец файла добавить секцию [Drivers] DDE2IP=C:\<Путь файлов драйвера>\DDE2IP.exe 2. В секции System [System] .... DDEdriver=DDE2IP ... Запустить Орбитрон от имени Администратора и включить передачу информации драйверу. dde2ip.rar
-
Такая цветовая схема. По моему, чёрный отлично гармонирует с синим и белым.
-
Движок сайта обновлен до последней версии.
-
Решили в этом году ничего не проводить, а просто прикинуться овощами и поехать на мероприятие к соседям в Тамбовскую область. Итого из Рязанской области приехали RU3SH & XYL, UD3SAE, RA3SAD & XYL, RC2SA, R2SBX. Хочется отметить отличную организацию слета и в целом достаточно дружный коллектив. Отлично провели время.



-
Изменения на 16.08.2021. 1. Сайт перемещен из архива в основной домен. 2. Отключены мини-чат, объявления, блоги. 3. Включена регистрация пользователей.
-
На одном из форумов наткнулся на интересный материал по импортным ВЧ разъемам (PL, SMA, N, TNC и .т. д.). В тексте приводятся их характеристики по затуханию, мощности, применяемым частотным границам и прочее. Может кому-нибудь информация будет полезной. Miniatyurnye_radiochastotnye_soediniteli__2013.pdf
- 2 ответа
-
- 1
-

-
Уже не "торт". Сейчас престижно

-
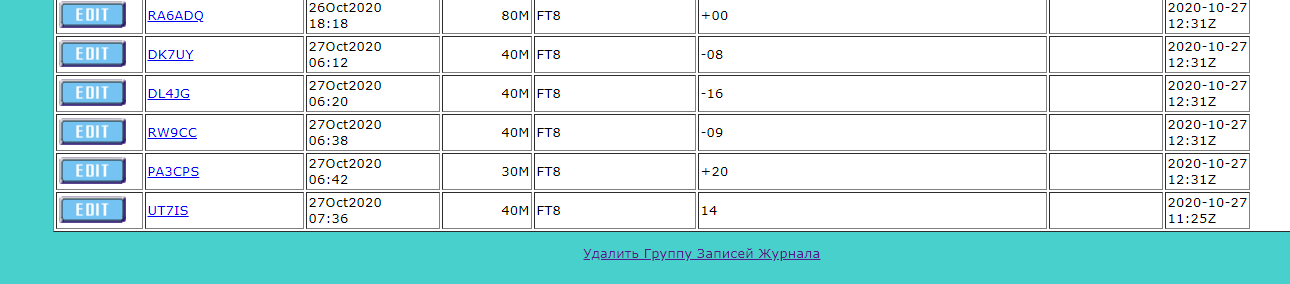
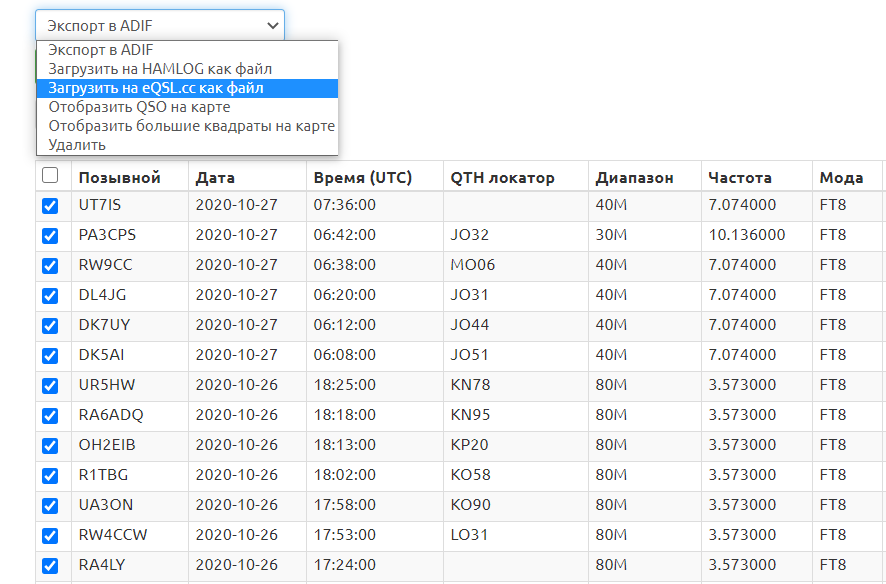
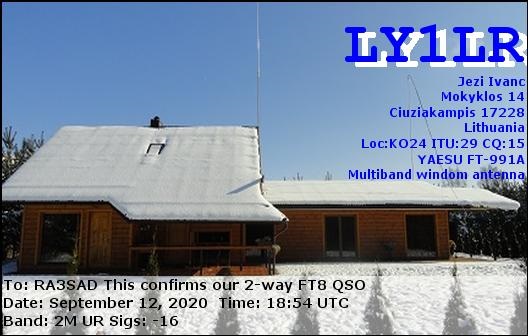
Нововведение. Загрузка QSO на сервис eQSL.cc. Для того чтобы иметь возможность загружать связи на eQSL необходимо в настройках профиля указать учетные данные от этого сервиса. Данные шифрованы по аналогии с Hamlog. В картинках: 1. 2. Итого на eQSL.cc Для тестирования зарегистрировался сам. Увидел интересные QSLки типа такой R3SE, Андрей, поясните пожалуйста что такое LoTW в двух словах и нужна ли интеграция с ним?
-
GOOD NEWS! Повышаем безопасность. Изменения в способе хранения учетных данных от Hamlog.ru. Теперь они хранятся в двоичном формате, имеют псевдослучайный размер Байт и зашифрованы ключем уникальным для каждого пользователя.
-
Отсылка работает. Но ваши данные пока хранятся в открытом виде (в смысле закрытой ото всех но ячейка в БД имеет действующее значение). В кругах разработчиков такой подход считается не безопасным. Хамлог на данный момент не предоставляет иного выхода. У меня есть идея как зашифровать данные на стороне моего лога, но надо проработать алгоритм. Если удастся - отпишусь. Цель - сделать так что при возможной утечке данных из БД не возможно было с ними ничего сделать не зная алгоритма дешифровки, который должен быть прописан в коде программы.
-
Андрей, для Clublog нашел такую статью - https://clublog.freshdesk.com/support/solutions/articles/3000093504-club-log-gateway-for-real-time-uploads , похоже то что надо. Для HRDLog - https://github.com/iw1qlh/UdpBridge . Суть сводится к тому, что на ваш компьютер ставится дополнительное ПО - мост между UDP трафиком и конечным логом. То есть "внутренней" поддержки без каких-либо прослоек работа по сети не поддерживается. Это, что мне выдал Google. Сам этими сервисами не пользуюсь.
-
Это можно удалить, так все хорошо. Если что-то не пойдет - пишите тут. Будем разбираться.
-
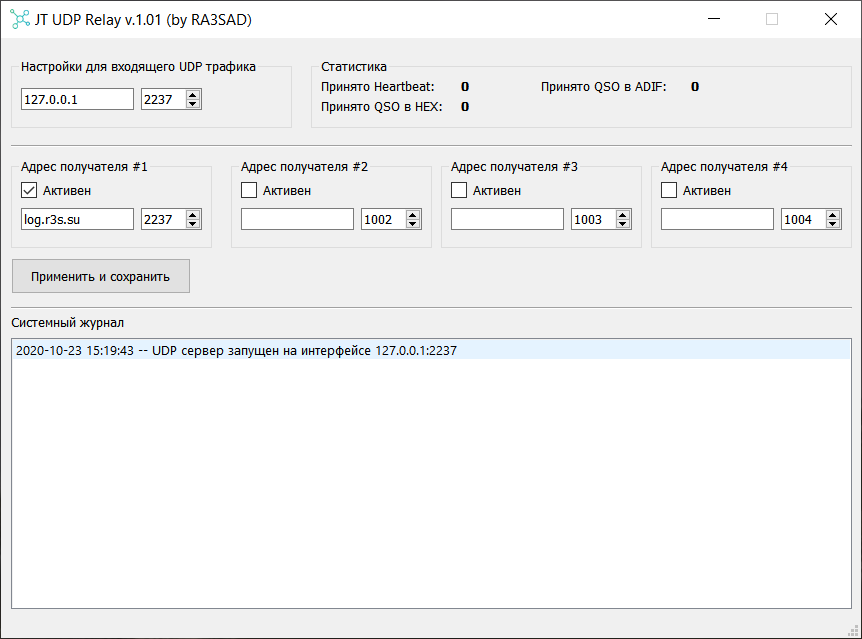
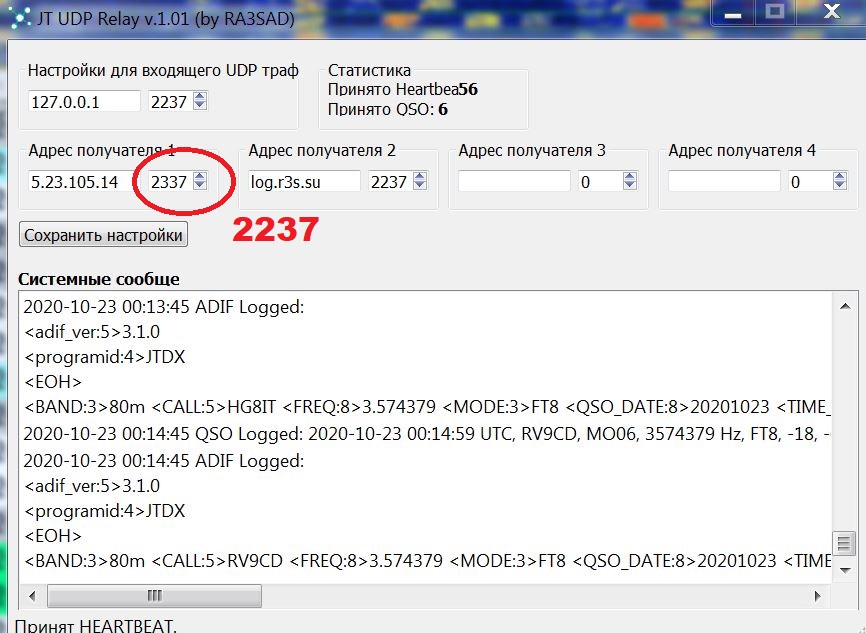
Update. Исправлена не корректная работа с доменными именами вместо IP адреса + кое-что добавлено. JT-UDP-Relay-x32.rar JT-UDP-Relay-x64.rar
-
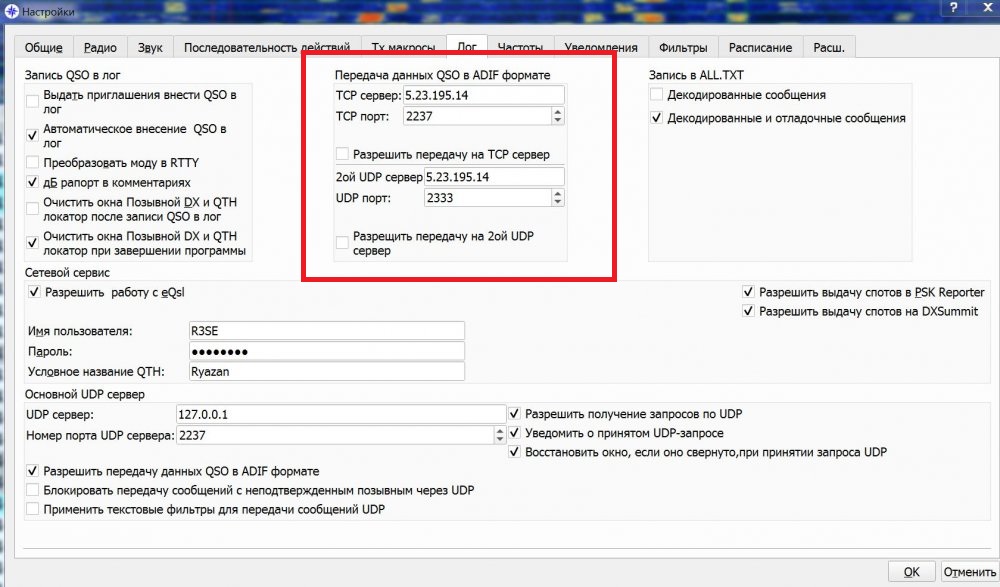
Андрей, приложите фотографию сетевых настроек JTDX. Да, действительно, если ввести log.r3s.su вместо IP адреса, то пакеты не идут. Примерно знаю где проблема в коде. Исправлю. В то же время у вас не верно указан порт для адреса 5.23.105.14. Нужно указывать 2237 вместо 2337. По этому и не пришло ничего. И у вас оЧепятка и у меня небольшой баг.
-
Сборка под 64-разрядную ОС. JT-UDP-Relay-x64.rar
-
да, на 64 должна запуститься, если надо - соберу отдельно под 64. Можно запускать в любой последовательности.